
فناوری اطلاعات, عمومی, همه
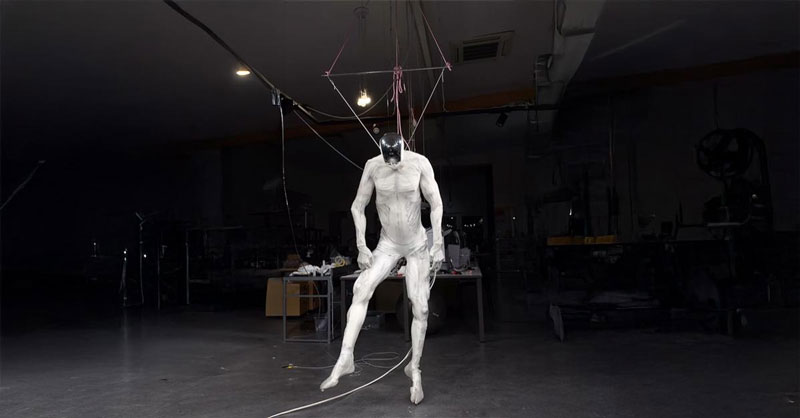
ربات انسان نمای Protoclone V1
طلوع گونهای جدید از رباتهای انساننما با الهام از طبیعت زیستی
ربات در عصر حاضر، مرز بین جهان مکانیکی و زیستی به سرعت در حال محو شدن است. Protoclone V1 محصولی پیشرو در این زمینه است که نه به عنوان یک ربات معمولی، بلکه به عنوان یک «پروتوتیپ یا نمونه اولیه از یک همتای زنده» معرفی میشود. این مقاله به بررسی جامع فلسفه طراحی، فناوریهای شگفتانگیز، نقاط قوت متعدد و نوآوریهای بنیادین این ربات میپردازد که آن را به یکی از امیدوارکنندهترین دستاوردهای دهه حاضر در حوزه رباتیک انساننما تبدیل کرده است.
از رویا تا واقعیت
ایده ساخت رباتی که بتواند با چابکی و هوشمندی یک انسان در محیطهای پیچیده تعامل کند، برای دههها ذهن دانشمندان را به خود مشغول کرده است. با این حال، بیشتر رباتهای انساننما با محدودیتهای جدی در زمینه حرکت پویا، تعامل طبیعی و تطبیقپذیری مواجه بودهاند. Protoclone V1 پاسخی جسورانه به این چالشهاست. هدف از طراحی این ربات، خلق موجودیتی مکانیکی نبود، بلکه ایجاد «اسکلتی اولیه» (Proto-Clone) برای یک موجود مصنوعی بود که بتواند اساس نسل آینده رباتهای مستقل و همکار را تشکیل دهد.
ایده طراحی: تقلید زیستی Biomimicry به مثابه یک فلسفه
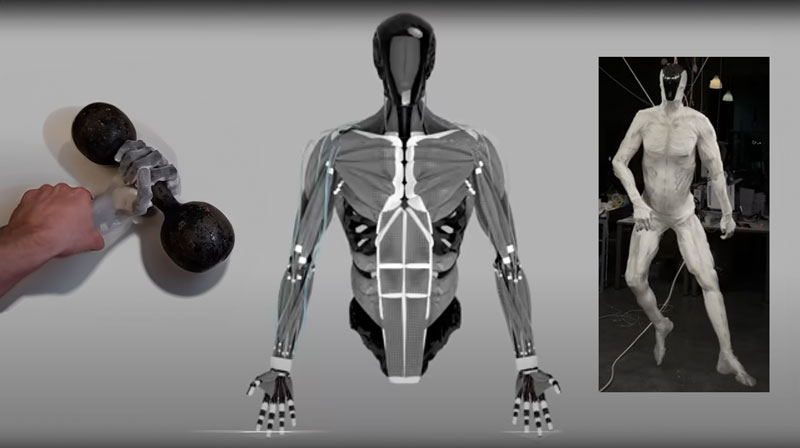
هسته اصلی ایده طراحی Protoclone V1، فراتر از تقلید ظاهری از انسان، مبتنی بر مفهوم عمیق تقلید زیستی Biomimicry است. تیم طراحی معتقد بود که برای دستیابی به کارایی و انعطافپذیری موجودات زنده، باید به تقلید از راهحلهای میلیونها ساله تکامل پرداخت.
لینک اختصاصی چینود

- اسکلت عضلانی-فشاری (Pseudo-Musculoskeletal System): به جای استفاده از موتورهای الکتریکی معمولی و گیربکسها، Protoclone V1 از یک سیستم محرکه الهامگرفته از بدن انسان استفاده میکند. این سیستم ترکیبی از فعالسازهای پنوماتیک مصنوعی شبیه به ماهیچهها و تاندونهای مصنوعی ساخته شده از پلیمرهای فوق العاده مقاوم است که به یک اسکلت سبکوزن متصل شدهاند. این معماری نه تنها حرکتهایی نرم و طبیعی شبیه به انسان را ممکن میسازد، بلکه توانایی جذب ضربه و سازگاری با سطوح ناهموار را به طور چشمگیری افزایش میدهد.
- طراحی شناختی-ادراکی: حسگرهای Protoclone V1 بر اساس یک الگوی چندحسی (Multi-sensory) و یکپارچه، مشابه سیستمهای حسی انسان طراحی شدهاند. دادههای بینایی، شنیداری، لامسه و حتی حسی از وضعیت مفاصل (Proprioception) به طور همزمان پردازش میشوند تا درک جامعی از محیط فراهم شود.
فناوریهای کلیدی به کار رفته
دستیابی به چنین سطحی از پیچیدگی مستلزم به کارگیری مجموعهای از پیشرفتهترین فناوریها است:
- هوش مصنوعی ناهمگام (Heterogeneous AI): مغز متفکر Protoclone V1 یک سیستم هوش مصنوعی واحد نیست، بلکه شبکهای از چندین مدل تخصصی است که به صورت ناهمگام کار میکنند. یک مدل برای بینایی ماشین، دیگری برای برنامهریزی حرکت، یکی برای تشخیص گفتار و تعامل اجتماعی، و یک مدل ناظر فرامنطقی Meta-Reasoning Model که تمامی این پردازشها را هماهنگ و تصمیمهای نهایی را میگیرد. این معماری از خطرات “هوش مصنوعی تکقطبی” جلوگیری کرده و قابلیت اطمینان را افزایش میدهد.پ
- مواد پیشرفته: بدنه Protoclone V1 از کامپوزیتهای سبکوزن و مستحکم ساخته شده که نسبت استحکام به وزن آنها قابل مقایسه با استخوانهای انسان است. پوشش خارجی آن از یک پوست مصنوعی حسگرمند Sensory E-Skin تشکیل شده که مجهز به شبکهای متراکم از حسگرهای فشار، دما و رطوبت است. این پوست نه تنها امکان لمس ظریف را فراهم میکند، بلکه به ربات کمک میکند تا به صورت ناخودآگاه از موانع اجتناب کند.
- سامانه بینایی سه بعدی پویا: به جای دوربینهای ثابت، چشمان Protoclone V1 از مکانیزمی مشتیب از حرکات چشم انسان (Saccades) برخوردارند که امکان تمرکز سریع بر روی نقاط مختلف و ردیابی اجسام متحرک با دقت بسیار بالا را فراهم میکند.
- باتری حالت جامد با چگالی انرژی بالا: برای تامین انرژی این سیستم پیچیده، از باتریهای حالت جامد نسل جدیدی استفاده شده که با وجود ابعاد فشرده، امکان فعالیت پیوسته تا ۷۲ ساعت را فراهم میکنند.
نقاط قوت و مزایای رقابتی
ترکیب ایده طراحی و فناوریهای پیشرفته، نقاط قوت متعددی را برای Protoclone V1 به ارمغان آورده است:
- حرکت بینظیر و پویا: به لطف سیستم شبه-عضلانی، ربات Protoclone V1 قادر به انجام حرکتهایی است که برای رباتهای دارای مفاصل سفت و سخت غیرممکن است. راه رفتن روی سطوح ناهموار، دویدن با گامهای adjustable، پریدن و حتی حفظ تعادل تحت فشارهای خارجی از جمله این قابلیتهاست.
- تعامل اجتماعی طبیعی: کیفیت حرکت نرم، همراه با هوش مصنوعی قدرتمند، باعث شده تعامل با این ربات برای انسانها بسیار直观 و طبیعی احساس شود. این ویژگی، کاربرد آن را در نقشهایی مانند دستیار شخصی، میزبان یا مربی بسیار ایدهآل میسازد.
- انعطافپذیری و تطبیقپذیری بالا: معماری ماژولاری و هوش مصنوعی ناهمگام به این معناست که ربات میتواند برای انجام وظایف بسیار متنوعی، از کمک در امور بیمارستانی تا انجام عملیات امداد و نجات در مناطق災زده، آموزش ببیند و به سرعت با شرایط جدید سازگار شود.
- ایمنی ذاتی: ماهیت نرم و انعطافپذیر سیستم محرکه و پوشش حسگرمند، خطر آسیب رساندن به انسانها یا شکستن اشیاء در اثر برخورد را به حداقل میرساند. این یک پیشنیاز اساسی برای همکاری نزدیک انسان و ربات است.

نوآوریهای بنیادین
Protoclone V1 را میتوان حامل چندین نوآوری تحولآفرین دانست:
معماری سینرژیک (Synergistic Architecture): بزرگترین نوآوری ربات Protoclone V1، یکپارچهسازی عمیق سختافزار و نرمافزار است. طراحی فیزیکی و الگوریتمهای هوش مصنوعی آن نه به صورت جداگانه، بلکه از پایه و در کنار هم توسعه یافتهاند. به عنوان مثال، الگوریتم کنترل حرکت، مستقیماً از ویژگیهای دینامیک سیستم عضلانی-فشاری الهام گرفته است.
یادگیری تقلید زیستی (Biomimetic Learning): این ربات از الگوریتمهای یادگیری تقویتی پیشرفته استفاده نمیکند که صرفاً بر پایه سعی و خطا استوار باشند. در عوض، از دادههای حرکتی انسان (Motion Capture Data) برای “آموزش اولیه” سیستم عصبی-حرکتی خود بهره میبرد و سپس آن را در محیط واقعی اصلاح میکند. این روش، زمان یادگیری را به شدت کاهش میدهد.
چارچوب اخلاقی و ایمنی توکار (Embedded Ethical Framework): برای اولین بار در یک ربات انساننمای این سطح، یک چارچوب اخلاقی مبتنی بر قواعد (Rule-based) به طور مستقیم در مدل ناظر فرامنطقی آن تعبیه شده است. این چارچوب، تصمیمگیریهای ربات را در موقعیتهای بحرانی محدود میکند و اولویت همیشه با ایمنی انسانها است.

نتیجهگیری و چشمانداز آینده
ربات Protoclone V1 تنها یک قدم در یک سفر طولانی است، اما بدون شک قدمی بزرگ و تعیینکننده محسوب میشود. این ربات ثابت کرد که رویکرد تقلید زیستی میتواند راهگشای بسیاری از بنبستهای فعلی در رباتیک باشد. با ادامه توسعه، میتوان انتظار داشت نسلهای آینده ربات Protoclone در حوزههایی مانند پزشکی جراحی و توانبخشی اکتشاف در محیطهای خصومتآمیز اعماق دریا و فضا و به عنوان همکاران همهفنحریف در خانه و صنعت انقلابی به پا کنند. Protoclone V1 نه یک محصول نهایی، که نویدبخش آیندهای است که در آن ماشینها و انسانها میتوانند به شیوهای عمیقتر، ایمنتر و طبیعیتر همزیستی داشته باشند.
مطالب مرتبط

فناوری اطلاعات عمومی همه
ماشین برقی شیائومی

تاریخ ایران عمومی همه
روز طبیعت در ایران : 13 بهدر

همه دیرینه شناسی عمومی
آنچه در دوره رنسانس گذشت

ناشناخته ها عمومی همه
تلسکوپ جیمز وب

عمومی همه
تاثیر موسیقی بر ورزش

فناوری اطلاعات عمومی همه
چت بات واتسون

فناوری اطلاعات عمومی همه
5G و ایلان ماسک

ناشناخته ها عمومی همه
آندرومدا چیست؟
